

2DM860H
所屬分類:
產品描述
一、概述
2DM860H是數字式兩相步進驅動,采用最新的32位DSP技術進行控制。此數字驅動器外設有細分、電流撥碼,可由用戶根據需要自由設置,內部 DSP 編寫有先進驅動控制算法,能保證步進電機在各速度段精準、穩定運行,其中,內置細分算法,能使電機在低轉速時平穩運行;中高速力矩補償算法,能最大限度的提高電機中高轉速時的轉矩;參數自整定算法,能自適應各種電機,最大限度發揮電機性能;內置平滑算法,能極大提升電機加減速性能。總之,此數字驅動器采用先進的技術,能夠滿足大多數場合的應用,是一款性價比極高的運動控制產品。
二、特點
參數自整定,電機自適應;
內置高細分;
振動小,低發熱,低速運行平穩;
中、高速力矩補償;
電流矢量控制,電流效能高;
內置加減速控制,改善啟停平滑性;
單、雙脈沖控制模式
可選擇;
電機運行位置記憶;
輸入信號差分光耦隔離,兼容 5V~24V;
用戶可自定義細分;
電流、細分撥碼設定方便;
過流保護,過壓保護,欠壓保護;
綠燈表示運行,紅燈表示保護或脫機;
三、端口說明
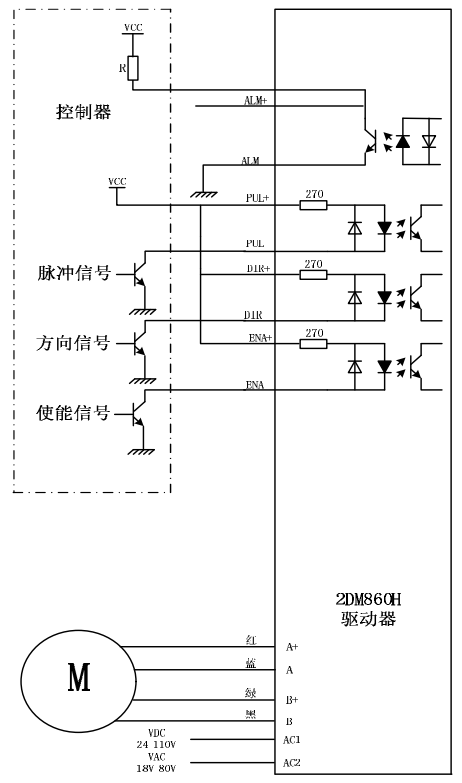
3.1 ALM 信號輸出端口
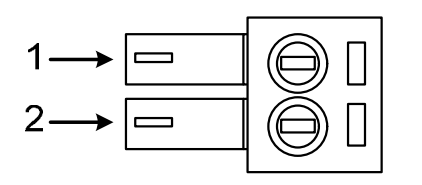
| 端子號 | 符號 | 名稱 | 說明 |
| 1 | ALM+ | 報警輸出正 | 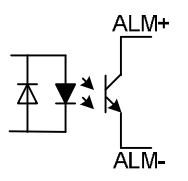 |
| 2 | ALM- | 報警輸出負 |
3.2 控制信號輸入端口
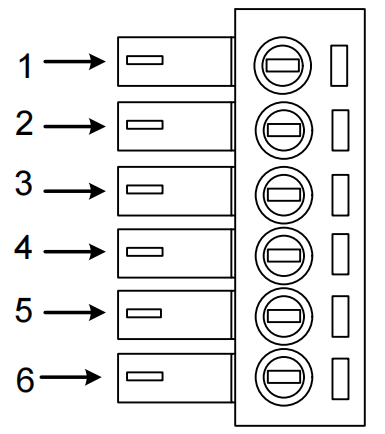
| 端子號 | 符號 | 名稱 | 說明 |
| 1 | DIR- | 方向輸入負 | 兼容 5V~24V 電平 |
| 2 | DIR+ | 方向輸入正 | |
| 3 | PLS- | 脈沖輸入負 | 兼容 5V~24V 電平 |
| 4 | PLS+ | 脈沖輸入正 | |
| 5 | ENA- | 使能輸入負 | 兼容 5V~24V 電平 |
| 6 | ENA+ | 使能輸入正 |
3.3 功率端口
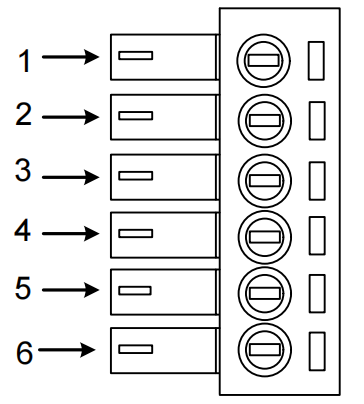
| 端子號 | 標識 | 符號 | 名稱 | 說明 |
| 1 | 電機相線 | A+ | 電機 A+端(紅) | 電機 A 相繞組 |
| 2 | A- | 電機 A-端(藍) | ||
| 3 | B+ | 電機 B+端(綠) | 電機 B 相繞組 | |
| 4 | B- | 電機 B-端(黑) | ||
| 5 | 電源輸入端 | VCC | 電源正極 | DC30V-110V或VAC24V-80V |
| 6 | GND | 電源負極 |
四、技術指標
| 輸入電壓 | DC30V-110V AC24V-80V | |
| 連續電流 | 7.5A 20KHz PWM | |
| 最大脈沖頻率 | 200K | |
| 默認通訊速率 | 57.6Kbps | |
| 保護 |
過電流動作值 峰值 12A±10% 過壓電壓動作值 130VDC 欠壓電壓動作值 20VDC |
|
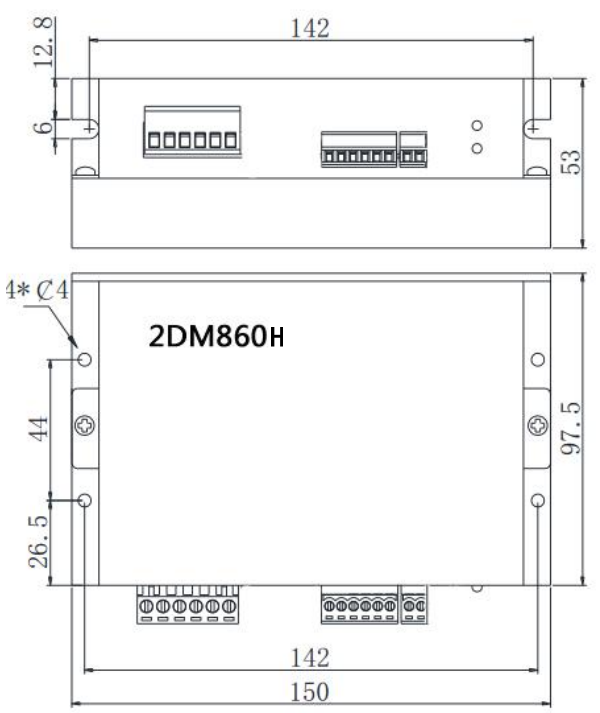
| 外形尺寸(mm) | 150×97.5×53 | |
| 重量 | 約 580g | |
| 使用環境 | 場合 | 盡量避免粉塵、油霧及腐蝕性氣體 |
| 工作溫度 | 0~70℃ | |
| 儲存溫度 | -20℃~+80℃ | |
| 濕度 | 40~90%RH | |
| 冷卻方式 | 自然冷卻或強制冷風 | |
五、控制信號接線
5.1 控制信號單端共陽極接線
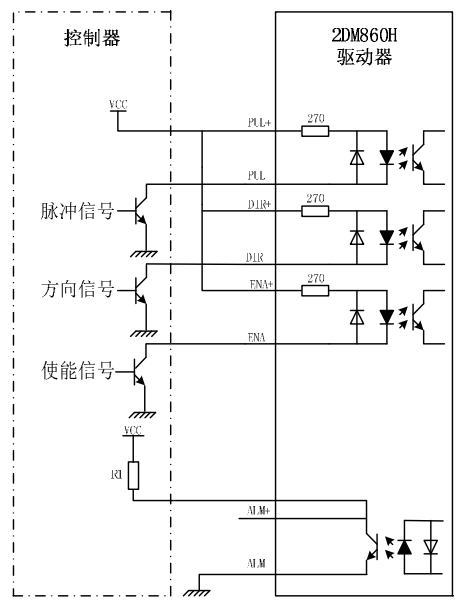
注意:
VCC 可兼容 5V~24V。
電阻 R1 接在控制信號端,阻值為 3~5K。
5.2 控制信號單端共陰極接線
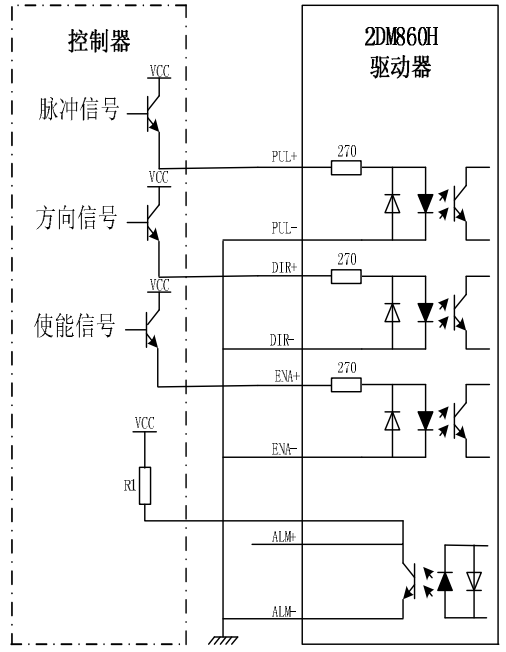
注意:
VCC 可兼容 5V~24V。
電阻 R1 接在控制信號端,阻值為 3~5K。
5.3 控制信號差分接線方式
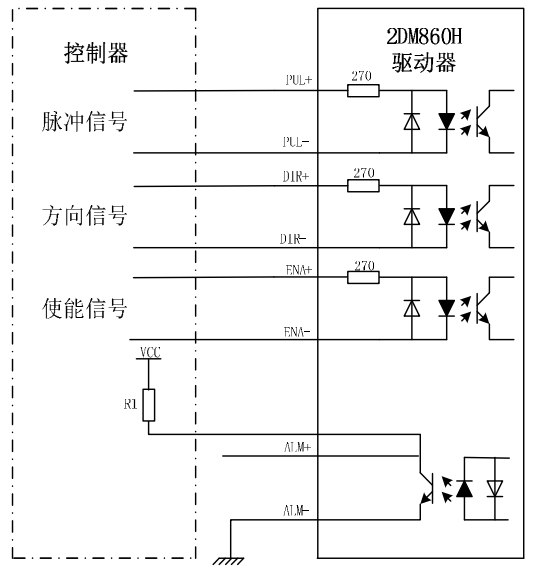
注意:
VCC 可兼容 5V~24V。
電阻 R1 接在控制信號端,阻值為 3~5K。
5.4 232 串口通信接線圖
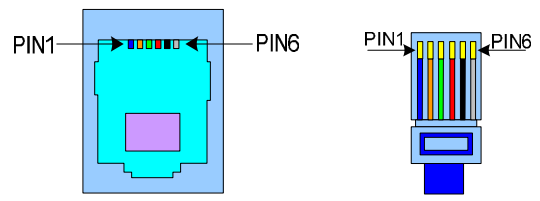
| 水晶頭腳位 | 定義 | 說明 |
| 1 | TXD | 發送端 |
| 2 | RXD | 接收端 |
| 4 | +5V | 僅供外部 HISU |
| 6 | GND | 電源地 |
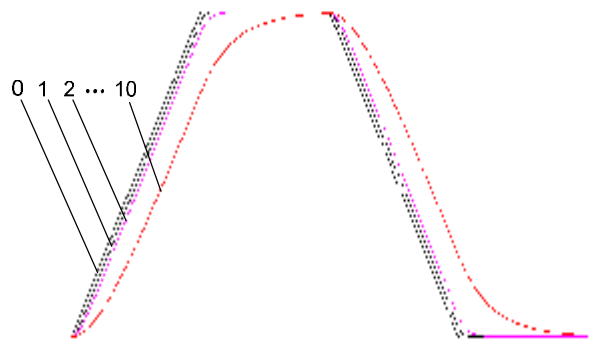
5.5 控制信號時序圖
為了避免一些誤動作和偏差,PUL、DIR 和 ENA 應滿足一定要求,如下圖所示:
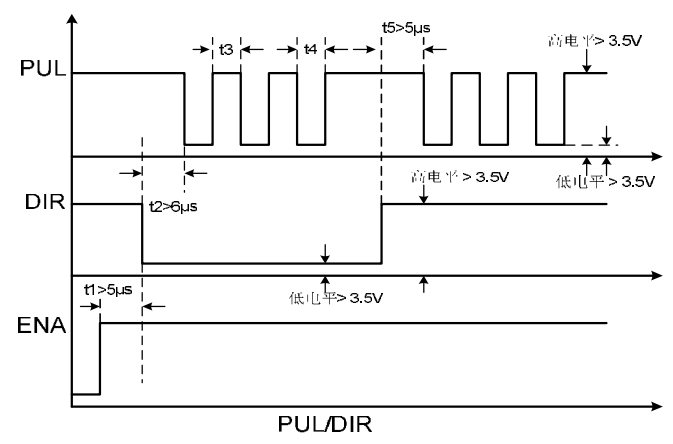
注釋:
(1)t1:ENA(使能信號)應提前 DIR 至少 5μs,確定為高。一般情況下建議 ENA+和 ENA-懸空即可。
(2)t2:DIR 至少提前 PUL 計數邊沿 6μs 確定其狀態高或低。
(3)t3:脈沖寬度不小于 2.5μs。
(4)t4:低電平寬度不小于 2.5μs。
六、撥碼開關設定
6.1 S1 電流撥碼設置
電流撥碼設置如下表所示。
| 電流/拔碼開關 | SW1 | SW2 | SW3 | |
| 峰值 | 有效值 | |||
| 2.1A | 1.5A | 0 | 0 | 0 |
| 3.15A | 2.25A | 1 | 0 | 0 |
| 4.03A | 2.88A | 0 | 1 | 0 |
| 4.78A | 3.42A | 1 | 1 | 0 |
| 5.69A | 4.06A | 0 | 0 | 1 |
| 6.44A | 4.60A | 1 | 0 | 1 |
| 7.35A | 5.25A | 0 | 1 | 1 |
| 8.4A | 6.0A | 1 | 1 | 1 |
6.2 停止電流設定
電機停止時(即停止給脈沖),電流可由SW4設定,off表示停止電流比電機正常運轉時要減小,on表示停止電流與電機正常運轉時一樣。一般建議將SW4設定為off,可以有效的減小電機和驅動器的發熱狀況。設置調試板的P15參數可更改停止給脈沖多長時間后電流開始減小,默認為50ms;設置調試板的P16參數可更改電流減小百分比,默認為減小50%。
6.3 S1 細分撥碼設置
驅動器的細分由撥碼開關設置,具體設置下表所示。另外,當細分撥碼表不能滿足用戶需要時,用戶可通過調試板自定義細分,設置參數P14為4~1000,則驅動器細分為4*50~1000*50,當設置調試板參數P14為0時,用戶自定義細分功能失效,此時細分由撥碼開關設置。
| 細分/撥碼開關 | SW5 | SW6 | SW7 | SW8 |
| 400 | 1 | 1 | 1 | 1 |
| 800 | 0 | 1 | 1 | 1 |
| 1600 | 1 | 0 | 1 | 1 |
| 3200 | 0 | 0 | 1 | 1 |
| 6400 | 1 | 1 | 0 | 1 |
| 12800 | 0 | 1 | 0 | 1 |
| 25600 | 1 | 0 | 0 | 1 |
| 51200 | 0 | 0 | 0 | 1 |
| 1000 | 1 | 1 | 1 | 0 |
| 2000 | 0 | 1 | 1 | 0 |
| 4000 | 1 | 0 | 1 | 0 |
| 5000 | 0 | 0 | 1 | 0 |
| 8000 | 1 | 1 | 0 | 0 |
| 10000 | 0 | 1 | 0 | 0 |
| 20000 | 1 | 0 | 0 | 0 |
| 40000 | 0 | 0 | 0 | 0 |
6.4 S2 輔助撥碼設置
| SW1 | ON | 自測模式(60r/min) |
| OFF | 外部脈沖控制模式 | |
| SW2 | ON | 雙脈沖模式 |
| OFF | 脈沖+方向模式 | |
| SW3 | ON | 外部脈沖最大頻率100K |
| OFF | 外部脈沖最大頻率200K | |
| SW4 | ON | 低電平使能有效 |
| OFF | 高電平使能有效 |
| D0 | 無平滑系數 |
| D1-D7 | 平滑增益逐漸增加 |
七、錯誤報警及 LED 燈閃爍次數
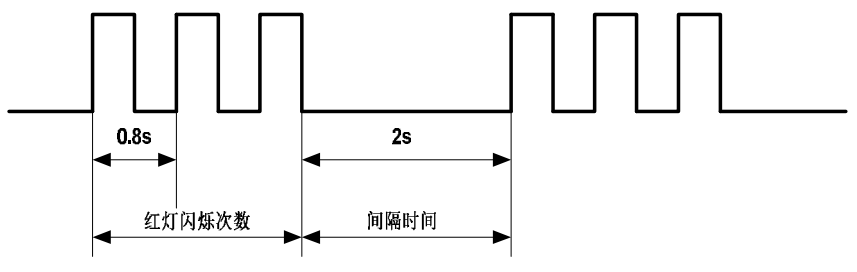
| 紅燈閃爍次數 | 報警說明 |
| 1 | 驅動器過流 |
| 2 | 驅動器內部電壓參考錯誤 |
| 3 | 驅動器參數上傳錯誤 |
| 4 | 驅動器供電電壓超過最大值 |
八、安裝尺寸
九、接線圖
2DM860H的參考如圖:
十、參數設置
2DM860H 驅動器的參數設置方法:通過 HISU 調試器的RS232 串行通訊口,采用專用調試板完成參數設置,驅動器內部存有一套對應電機最佳的默認出廠配置參數,用戶只須按照具體使用情況調整驅動器內部參數即可,具體參數及功能見下表:
參數的實際值=設定值╳相應的量綱
| 序號 | 名稱 | 范圍 | 量綱 | 重啟 驅動 | 默認 參數 |
| P0 | 驅動器復位 | 0-100 | 1 | 11 | |
| P1 | 電流環比例 | 0_4000 | 1 | 是 | 500 |
| P2 | 電流環積分 | 0_1000 | 1 | 是 | 100 |
| P3 | 系統阻尼系數 | 0_500 | 1 | 否 | 100 |
| P4 | 第一共振點幅值 | 0-100 | 1 | 否 | 0 |
| P5 | 第一共振點相位 | 0-100 | 1 | 否 | 0 |
| P6 | 第二共振點幅值 | 0-100 | 1 | 否 | 0 |
| P7 | 第二共振點相位 | 0-100 | 1 | 否 | 0 |
| P8 | 第三共振點幅值 | 0-100 | 1 | 否 | 0 |
| P9 | 第三共振點幅值 | 0-100 | 1 | 否 | 0 |
| P10 | 使能信號電平 | 0-1 | 1 | 否 | 0 |
| P11 | 脈沖邊沿電平 | 0-1 | 1 | 否 | 1 |
| P12 | 保留 | 0-1 | 1 | 0 | |
| P13 | 輸入脈沖選擇 | 0-1 | 1 | 否 | 0 |
| P14 | 用戶自定義細分 | 4-1000 | 50 | 是 | 0 |
| P15 | 停止半流時間 | 0-4000 | 1ms | 是 | 1000 |
| P16 | 停止電流百分比 | 0-100 | 1 | 是 | 50 |
| P17 | 指令平滑系數 | 0-10 | 1 | 是 | 2 |
| P18 | 位置記憶使能 | 0-1 | 1 | 是 | 1 |
| P19 | 用戶自定義電機電感 | 0-100 | mh | 是 | 0 |
| P20 | 用戶自定義電機電阻 | 0-100 | 0.1Ω | 是 | 0 |
| P21 | 保留 | ||||
| P22 | 位置記憶啟動時間 | 0-100 | 1s | 是 | 0 |
此驅動共有 20 個參數可以調節:
參數 P1,P2 用于設置上電瞬間電流環的比例和積分參數。電機運行時電流環的比例、積分參數由自整定算法自動得到。
參數 P3 用于調節系統阻尼系數,用于增強電機在中高速時的力矩,同時也能抑制振動。
參數 P4,P5,P6,P7,P8,P9 分別用于消除電機的三個共振點。
參數 P10,用于使能電平選擇,0 表示使能信號為低電平時電機處于脫機狀態,1 表示使能信號為高電平是電機處于脫機狀態。
參數 P11,用于脈沖邊沿選擇,0 表示脈沖信號為上升沿有效,1 表示脈沖信號為下降沿有效。
參數 P12,保留。21
參數 P13,用于選擇單雙脈沖模式,0 表示選擇單脈沖模式,1 表示為雙脈沖模式。
參數 P14,用于用戶自定義細分,設置為 0 時表示使用撥碼開關設置細分,設置為 4~1000 時表示細分分別為4*40~1000*40,例如,設置 P14 為 80,則驅動器細分設置為80*50=4000 細分,此時撥碼開關所設置細分不起作用。
參數 P15,用于設置脈沖停止多長時間后電流開始減小。
參數 P16,用于設置電流減小的百分比
參數 P17,指令平滑系數
參數 P18,用于使能位置記憶功能。0 表示不啟用位置記憶功能,1 表示啟用位置記憶功能。
參數 P19,用于用戶自己設定電機電感。0 表示啟用自辨識算法自動辨識電機電感,其他數值表示不啟用辨識算法,采用用戶設定電感參數。
參數 P20,用于用戶自己設定電機電阻。0 表示啟用自辨識算法自動辨識電機電阻,其他數值表示不啟用辨識算法,采用用戶設定電阻參數。
參數 P21,保留。
參數 P22,用于設置脈沖停止多長時間后啟動位置記憶功能。
十一、常見問題及故障處理
11.1 電源燈不亮
輸入電源故障,請檢電源線路.電壓是否過低
11.2 上電亮紅燈報警
電機電源相線是否連接
驅動器輸入電源電壓是否過高或者過低
11.3 脈沖輸入后不轉動
驅動器的脈沖輸入端的接線是否可靠
驅動器系統配置中的輸入方式是否為脈沖輸入相關的輸入方式
電機是否使能松開



